数图知识点来源:《数字图像处理》(贾永红)。
数字图像处理。
(知识点来源:课本《数字图像处理》(贾永红),总结的内容是我们学校老师划的期末范围,主要目的是掌握基本概念)
第二章:数字图像处理的基本概念
2.3 图像数字化
数字化是将一幅画面转化成计算机能处理的数字图像的过程。
包括:采样和量化。
2.3.1、2.3.2采样与量化
1.采样:将空间上连续的图像变换成离散点。(采样间隔、采样孔径)
2.量化:采样后的图像被分割成空间上离散的像素,但是灰度是连续的,量化就是将像素灰度转换成离散的整数值。
一幅数字图像中不同灰度值的个数称为灰度级。二值图像是灰度级只有两级的。(通常是0和1)
存储一幅大小为M×N、灰度级数为G的图像所需的存储空间:
2.3.3像素数、量化参数与数字化所得到的数字图像间的关系
1.一般来说,采样间隔越大,所得图像像素数越少,空间分辨率低,质量差,严重时会出现国际棋盘效应。
采样间隔越小,所的图像像素数越多,空间分辨率高,图像质量好,但是数据量大。
2.量化等级越多,图像层次越丰富,灰度分辨率高,图像质量好,但数据量大。
量化等级越少,图像层次欠丰富,灰度分辨率低,会出现假轮廓,质量变差,但数据量小。
2.4 图像灰度直方图
2.4.1定义
灰度直方图是反映一幅图像中各灰度级像素出现的频率,反映灰度分布情况。
2.4.2性质
(1)只能反映灰度分布,丢失像素位置信息
(2)一幅图像对应唯一灰度直方图,反之不一定。
(3)一幅图像分成多个区域,多个区域的直方图之和是原图像的直方图。
2.4.3应用
(1)判断图像量化是否恰当
(2)确定图像二值化的阈值

(3) 物体部分灰度值比其他部分灰度值大的时候可以统计图像中物体面积。
(4)计算图像信息量(熵)
2.5图像处理算法的形式
2.5.1基本功能形式
(1)单幅->单幅
(2)多幅->单幅
(3)多幅/单幅->数字或符号
2.5.2图像处理的几种具体算法形式
(1)局部处理(邻域,如4-邻域,8-邻域)(移动平均平滑法、空间域锐化等)
(2)迭代处理
反复对图像进行某种运算直到满足给定条件。
(3)跟踪处理
选择满足适当条件的像素作为起始像素,检查输入图像和已得到的输出结果,求出下一步应该处理的像素。
特点:依赖起始像素位置,避免徒劳处理,可能会提高精度,用于边界线等高线的跟踪。
(4)位置不变处理/位置可变处理
输出像素的值的计算方法与像素位置无关-位置不变处理。
(5)窗口处理/模板处理
只对特定部分进行处理。(矩形->窗口,任意形状->模板)
(6)串行处理和并行处理
串行处理:后一像素输出结果依赖于前面像素处理的结果,并且只能依次处理各像素。
并行处理:对各像素同时进行相同形式运算。
第三章 图像变换
目的:使图像处理问题简化,有利于特征提取。
线性位移不变系统:
傅里叶变换是全局变换。

第四章 图像增强
目的:改善图像清晰度,将图像转换成一种更适合人或者机器进行分析处理的形式。
抑制没有用的信息,提高图像使用价值。
4.1图像增强的点运算
(这一节在上一篇博客里写过了,这里不再重复。)
4.2空间域平滑
噪声会使图像退化、质量下降、图像模糊、特征淹没。
为了抑制噪声改善图像质量所进行的处理称为平滑或去噪,可以在空间域和频率域中进行。
(1)局部平滑法(邻域平滑法/移动平均法)
用像素邻域内各像素的灰度平均值代替该像素原来的灰度值,实现图像的平滑。
常用的邻域有4-邻域、8-邻域。
clc;clear all;
img = imread('412.jpg');
subplot(131),imshow(img),title('原图');
%添加均值为0,方差为0.02的高斯噪声。
I = imnoise(img,'gaussian',0,0.02);
subplot(132),imshow(I),title('加噪声');
for i=1:3
J(:,:,i)=filter2(fspecial('average',3),I(:,:,i))/255;
end
subplot(133),imshow(J),title('均值平滑后的图像');主要缺点:降低噪声的同时使图像产生模糊,特别是边缘和细节处。
为了克服简单局部平滑法的弊端,有许多保边缘细节的局部平滑算法。
(2)超限像素平滑法
原理:将f(x,y)和g(x,y)之差的绝对值与选定的阈值进行比较,根据比较结果确定最后的灰度。
%超限像素平滑法
clc;clear all;
img = imread('412.jpg');
I=rgb2gray(img);%灰度化
subplot(221),imshow(I);
[m,n]=size(I);
l=3;
L=ones(1);%1x1模板
S=ones(m-l+1,n-l+1);
for i=1:m-l+1
for j=1:n-l+1
S(i,j)=1/(l*l)*sum(sum(I(i:i+l-1,j:j+l-1)));%求平均
end
end
subplot(222),imshow(S,[]);
P=imnoise(I,'salt & pepper',0.05);%椒盐噪声
subplot(223),imshow(P);
T=30;%设置阈值
A=P;
for i=1:m-2
for j=1:n-2
if(abs(P(i,j)-S(i,j))>T)
A(i,j)=P(i,j);
else
A(i,j)=S(i,j);
end
end
end
subplot(224),imshow(A)随着邻域增大,去噪能力增强,但是模糊程度也大。
(3)灰度最相近的K个邻点平均法
原理:在n×n的窗口内属于同一几何体的像素,她们灰度值将高度相关。窗口中心像素的灰度值可以用窗口内与中心点灰度最接近的K哥邻点的平均灰度来代替。
(4)梯度倒数加权平滑法
图像在一个区域内灰度变化比区域之间的变化小,在边缘的梯度绝对值比区域内部梯度绝对值高。
在nxn窗口内把中心像素点与各个邻点之间剃度绝对值的倒数定义为各个邻点的加权值,则在区域内部的邻点加权值大,边缘、区域外的加权值小。这样对加权后的nxn邻域进行局部平均可以使得图像得到平滑又不至于边缘细节模糊。
(5)最大均匀性平滑
找出环绕图中每个像素的最均匀区域(灰度变化最小的邻域),用这个区域的灰度值代替这个像素原来的灰度值。
优点:消除噪声的同时保持边缘的清晰度。
缺点:复杂形状的边界会过分平滑并且细节消失。
(6)有选择保边缘平滑法
最大均匀性平滑的改进。
(7)空间低通滤波法

(8)多幅图像平均法
利用对同一景物的多幅图像加权平均来消除噪声。
(9)中值滤波(非线性的图像平滑法)
对一个滑动窗口内的各个像素灰度值排序,用中值代替窗口中心像素的原灰度值。
对脉冲干扰及椒盐噪声的抑制效果好,但是对点线等细节较多的图像不合适。
特性:
对离散阶跃信号、斜升信号不产生影响,连续个数小于窗口长度一半的离散脉冲将被平滑,三角函数的顶部平坦化。滤波后信号频谱基本不变。
比超限像素平滑法更有效抑制椒盐噪声。
4.3图像空间域锐化
增强边缘/轮廓。
4.3.1梯度锐化法

对于一幅图像突出的边缘区,梯度值较大,平滑区梯度值较小。灰度级为常数的区域,梯度为0。
其他算子:Roberts算子、Sobel算子、Prewitt算子、Laplace算子(线性二阶微分算子)等。
4.4图像频率域增强
包括:消除噪声、突出边缘。
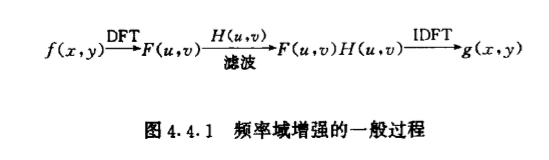
4.4.1频率域平滑
噪声主要集中在高频,所以利用低通滤波器来抑制高频部分。
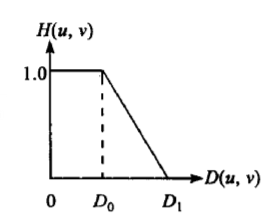
常用的频率域低通滤波器:
(1)理想低通滤波器

(2)巴特沃斯低通

(3)指数低通

(4)梯形低通
4.4.2频率域锐化
边缘细节在高频,图像模糊是由于高频成分太弱,所以用高通滤波器使得低频成分削弱。
常用的高通滤波器:
(1)理想高通
(2)巴特沃斯
(3)指数
(4)梯形
第五章 图像复原和重建
一般过程:分析退化原因->建立退化模型->反向推演->恢复图像
图像复原和图像增强的区别:
二者的目的都是为了改善图像质量,但是图像增强不考虑图像是怎么退化的,只是通过试探各种技术来增强图像的视觉效果。图像增强可以不顾增强后的图像是否失真。图像复原必须要知道图像退化的机制和过程的先验知识,找出一种相应的逆过程方法,从而得到复原的图像。如果图像退化,需要先复原,再增强。
第七章 图像分割
图像分析:
(1)把图像分割成不同区域/把不同对象分开。
(2)找出分开的各区域的特征。
(3)识别图像中要找的对象/图像分类。
(4)对不同区域进行描述/寻找不同区域的相互联系,进而找出相似结构/相关区域连成一个有意义的结构。

(2)是指各个子区域不重叠。
(3)是指同一个区域的像素应该有某些相同的特征。
(4)是指不同区域的像素应该有一些不同的特征。
分割方法:
(1)基于边缘提取的分割法-先提取区域边界
(2)区域分割
(3)区域增长
(4)分裂-合并(2,3的组合)
7.2边缘检测算子
(和图像锐化差不多,这里不写出来了。)
7.3边缘跟踪(将检测的边缘点连接成线)
有:光栅扫描跟踪\全向跟踪法。
7.4Hough变换

7.5区域分割法
7.5.1最简单图像的区域分割法
(1)P参数法(目标所占图像面积已知)
(2)状态法(灰度直方图双峰/有明显的谷)
(3)判断分析法(不能反映图像几何结构)
(4)最佳熵自动阈值法
(5)最小误差分割(感兴趣目标灰度级服从正态分布)
(6)局部阈值法
7.6区域增长
区域增长/扩张法有:单一性、质心型、混合型。
第八章 二值图像处理与形状分析
8.1.3连接成分
0像素和1像素要采用互反的连接形式。
孔:0像素的连接成分中如果存在和图像外围的1列/行的0像素不相连接的成分称为孔。
不含孔的1像素连接成分叫单连接,否则是多连接成分。
8.1.4欧拉数
欧拉数/示性数:二值图像中,1像素连接成分数C减去孔数H的值。
E=C-H
8.3形状特征提取与分析
分为:区域内部形状特征提取、区域外部形状特征提取
第九章 影像纹理分析
9.5灰度共生矩阵
在图像中任意一点(x,y)及偏离它的一点(x+a,y+b)(其中a,b为整数,认为定义)构成点对。设该点对的灰度值为(f1,f2),假设图像的最大灰度级为L,则f1与f2的组合共有L*L种。对于整福图像,统计每一种(f1,f2)值出现的次数,然后排列成一个方阵,再用(f1,f2)出现的总次数将它们归一化为出现的概率P(f1,f2),由此产生的矩阵为灰度共生矩阵。
摘录自:「sunny_develop」我觉得他写的很好,可以参考这个。
本博客所有文章除特别声明外,均采用 CC BY-SA 3.0协议 。转载请注明出处!